Forward Motion Using Wheels.
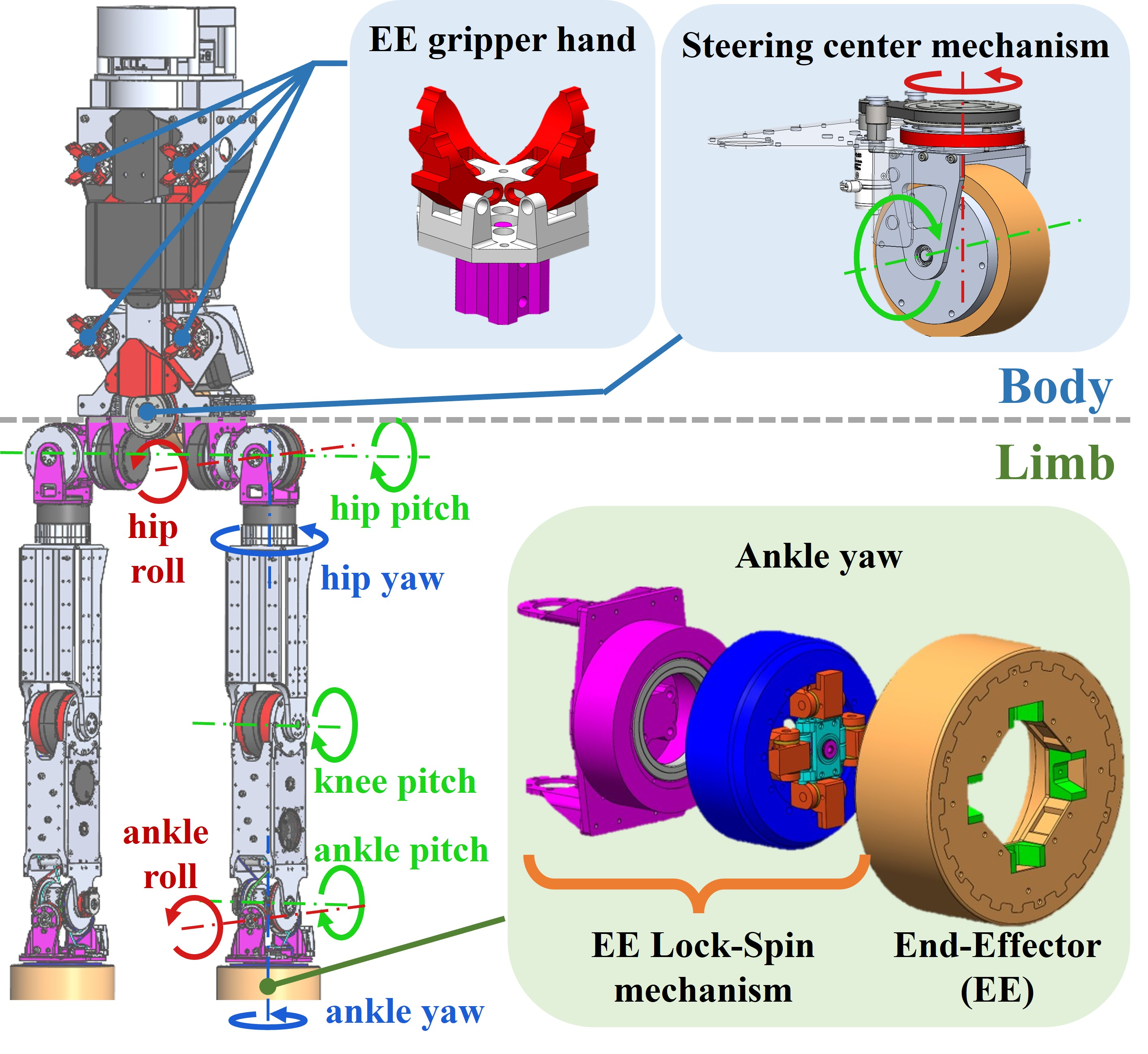
The robot is supported at three contact points: one 107mm-diameter wheel attached to the steering center joint, and two 150mm-diameter wheels mounted on the EE Lock-Spin mechanism. Each wheel tracks its target under position control. The robot moves straight for 0.6m.